
|
|
|
|
|
|
 |
|
|
For a more comprehensive view, please see my full list of online publications. Below I highlight a few selected papers, more will come out soon!! |
 |
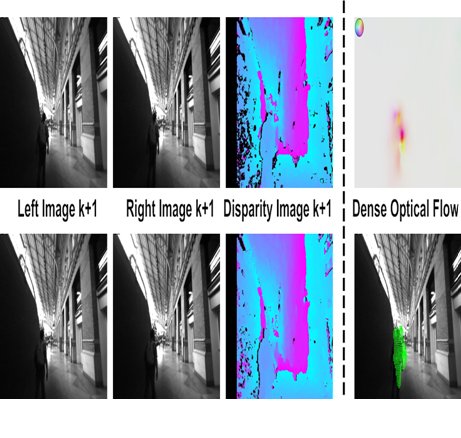
Large-Scale Dense 3D Reconstruction from Stereo Imagery Pablo F. Alcantarilla, Chris Beall and Frank Dellaert. In 5th Workshop on Planning, Perception and Navigation for Intellegent Vehicles (PPNV), Tokyo, Japan, November 2013. Best Paper Award!! Videos: https://www.youtube.com/watch?v=f7W_9lWWB2Q https://www.youtube.com/watch?v=fv6lfhSkJJk
|
In this paper we propose a novel large-scale dense 3D reconstruction method from stereo images. We fuse dense stereo disparity maps into a global model by using an efficient data association technique that takes into account stereo uncertainty and performs geometric and photometric consistency validation in a multi-view setup. Then, we apply efficient filtering techiniques to deal with large-scale storage requirements. |
|
 |
Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces Pablo F. Alcantarilla, Jesús Nuevo and Adrien Bartoli. In British Machine Vision Conference (BMVC). Bristol, UK. September 2013. bibtex Videos: akaze_video.avi Code: akaze_features_1_0_0 For more information about the code, please check this page |
| In this paper we propose an Accelerated version of KAZE Features. We use a novel mathematical framework called Fast Explicit Diffusion (FED) embedded in a pyramidal framework to speed-up dramatically the nonlinear scale space computation. In addition, we compute a robust Modified-Local Difference Binary (M-LDB) descriptor that exploits gradient information from the nonlinear scale space. A-KAZE obtains comparable results to KAZE in some datasets, while being several orders of magnitude faster. | |
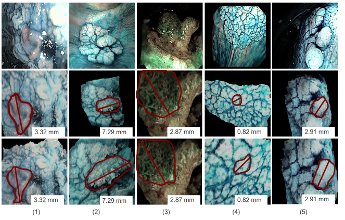 |
Enhanced Imaging Colonoscopy Facilitates Dense Motion-Based 3D Reconstruction Pablo F. Alcantarilla, Adrien Bartoli, François Chadebecq, Christophe Tilmant and Vincent Lepilliez. In International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). Osaka, Japan. July 2013. bibtex Videos: dense_3d_colonoscopy |
| In this paper we propose to use enhanced endoscopy modalities such as Narrow Band Imaging (NBI) and/or chromoscopy to facilitate dense 3D reconstruction from a single camera in colonoscopy. The obtained dense 3D models facilitate classification of neoplasia in the Paris classification, in which the 3D size and the shape of the neoplasia play a major role in the diagnosis. | |
|
Pablo F. Alcantarilla, Adrien Bartoli and Andrew J. Davison. In European Conference on Computer Vision (ECCV). Fiorenze, Italy. October 2012. bibtex Videos: kaze_video.avi Code: kaze_features_1_5_2 For more information about the code, please check this page |
|
In this paper we propose a novel feature detection and description method that operates completely in a nonlinear scale space. Previous methods such as SIFT or SURF find features in the Gaussian scale space. However, Gaussian blurring does not respect the natural boundaries of objects and smoothes in the same degree details and noise. By means of nonlinear diffusion we can detect and describe features in nonlinear scale spaces keeping important image details and removing noise as long as we evolve the image in the scale space. Our results reveal a big improvement in repeatability and distinctiviness. |
|
 |
Deformable 3D Reconstruction with an Object Database Pablo F. Alcantarilla and Adrien Bartoli. In British Machine Vision Conference (BMVC). Guldford, UK. September 2012. bibtex Videos: object_deformable_3d_bmvc12.avi |
In this paper we perform multiple template-based deformable surface reconstruction by using an object database that encodes both appearance and deformation constraints. We use multiple templates to achieve deformable 3D reconstruction from only one image and for multiple objects. Our algorithm uses object recognition to automatically discover what objects are visible in the input image and to select the appropriate templates to perform deformable 3D reconstruction. |
|
 |
Pablo F. Alcantarilla, José J. Yebes, Javier Almazán and Luis M. Bergasa. In IEEE International Conference on Robotics and Automation. (ICRA). St. Paul, USA. May 2012. bibtex Videos: vslam_sflow_icra12.mp4 |
In this paper, we propose to improve the robustness of traditional visual SLAM approaches by using a Dense Scene Flow representation of the environment. By using Scene Flow we can detect moving objects in the scene avoiding adding erroneous correspondences, improving considerably traditional SLAM results in highly dynamic environments with many independently moving objects |
|
 |
Pablo F. Alcantarilla, Kai Ni, Luis M. Bergasa and Frank Dellaert. In IEEE International Conference on Robotics and Automation. (ICRA). Shanghai, China. May 2011. bibtex Videos: visibility_icra11.avi (with audio!) |
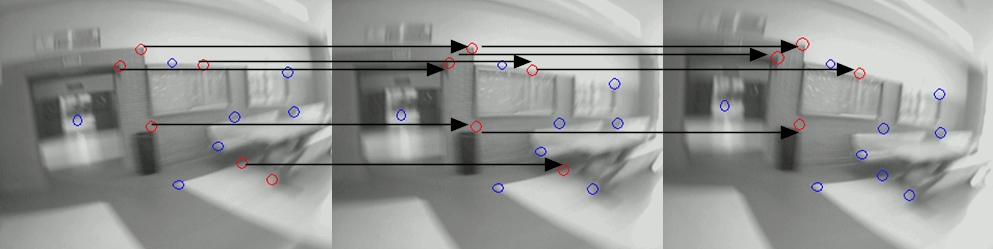
In this paper, we propose a novel approach to predict the visibility of known 3D points with respect to a query camera in large-scale environments. We show that by fully exploiting the geometric relationships between the 3D map and the camera poses, as well as the related appearance information, the resulting prediction is much more robust and efficient than conventional approaches. |
|
 |
Pablo F. Alcantarilla, Sang Min Oh, Gian Luca Mariottini, Luis M. Bergasa and Frank Dellaert. In IEEE International Conference on Robotics and Automation. (ICRA). Anchorage, Alaska, USA. May 2010. bibtex Videos: test_brute_force.avi test_heuristic.avi test_visibility.avi training_visibility.avi
|
In this paper we propose to exploit the geometric relationship between the 3D map and the camera pose to determine the visibility of the features. In our approach, we model the visibility of every map feature with respect to the camera pose using a non-parametric distribution model. We learn these non-parametric distributions during the 3D reconstruction process, and develop efficient algorithms to predict the visibility of features during localization. With this approach, the matching process only uses those map features with the highest visibility score, yielding a much faster algorithm and superior localization results. |
|
 |
Pablo F. Alcantarilla, Luis M. Bergasa and Frank Dellaert. In IEEE International Conference on Robotics and Automation. (ICRA). Anchorage, Alaska, USA. May 2010. bibtex |
In this work we propose increasing the robustness of EKF-SLAM techniques by replacing this general motion model with a visual odometry prior, which provides a real-time relative pose prior by tracking many hundreds of features from frame to frame. Incorporating the visual odometry prior in the EKF process yields better and more robust localization and mapping results when compared to the constant linear and angular velocity model case. |
|
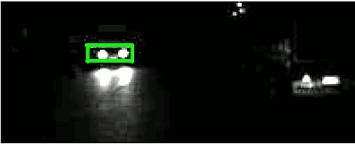 |
Night Time Vehicle Detection for Driving Assistance: LightBeam Controller
P.F. Alcantarilla, L.M. Bergasa, P. Jiménez, M.A. Sotelo, I. Parra, D. Fernández and S.S. Mayoral. In IEEE Intelligent Vehicles Symposium. (IV). Eindhoven, The Netherlands. October 2008. bibtex Videos: light_beam.avi |
In this paper we present an effective system for detecting vehicles in front of a camera-assisted vehicle (preceding vehicles traveling in the same direction and oncoming vehicles traveling in the opposite direction) during night time driving conditions in order to automatically change vehicle head lights between low beams and high beams avoiding glares for the drivers |
|