




|
|
|
|
|
|
 |
|
 |
In this section, you can download some code I have doing for my research in Computer Vision and Robotics. More will come out soon!!! I hope you can find some of the code useful for your applicaitions |
 |
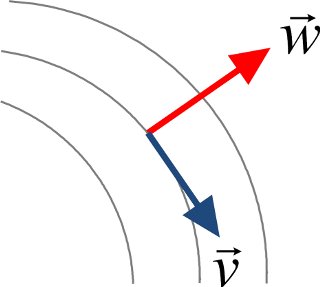
OpenGSURF is a C++ opensource library that is based on the original OpenSURF library developed by C. Evans. OpenGSURF comprises several invariant descriptors that are based on gauge derivatives. Gauge derivatives are a very important tool in computer vision and medical imaging, and multiscale gauge derivatives have very nice properties such as rotation invariance. In this library I coded several descriptors using gauge derivatives in a SURF descriptor framework obtaining very good and interesting matching results compared to other approaches. For more information you can check the following two works Vision Based Localization: From Humanoid Robots to Visually Impaired People. Pablo F. Alcantarilla. October 2011 bibtex Gauge-SURF Descriptors. Pablo F. Alcantarilla, Luis M. Bergasa and Andrew J. Davison. Image and Vision Computing. November 2012 If you use the library for any research projects, I will appreciate if you cite my thesis work until we have the acceptance of the submitted paper. Here you can download the Iguazu dataset used in the paper and thesis experiments |
 |
|
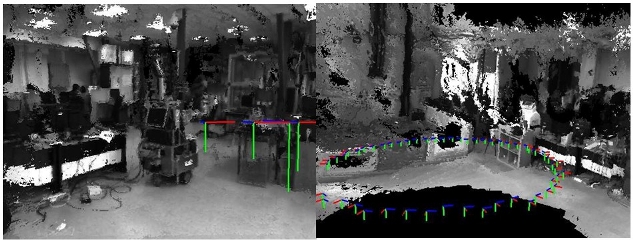 |
The program allows to render sparse 3D reconstructions or dense ones allowing to save images or video files while moving the camera view. By means of the keyboard you can change between different image views and zooms You can check a video here!! |
 |
This program shows several examples about how using new dense optical flow methods using GPU from the recent versions of the OpenCV library. In particular, you can easily try Brox, Farneback and Lukas-Kanade dense optical flow given an input video stream. Please see the README file for more information. |
 |
This program shows a C++ example of a StereoRig class and how stereo images can be rectified and undistorted by means of OpenCV functions. In addition, a dense disparity map is also computed by means of the OpenCV disparity block matching algorithm. The StereoRig class has several methods that can be of interest for stereo based applications, such as: uncertainty estimation, disparity map representation with different color spaces, etc. Please see the README file for more information. |