Participation in public and private funded projects
Smart Driving
Applications. Funded by the Spanish Ministry of
Education and Competitiveness for the period 2013-2015.
Robocity2030 II-CM.
Funded by the Community of Madrid for the period 2010-2013 and
participating in conjunction with the remaining 5 public
Universities of Madrid.
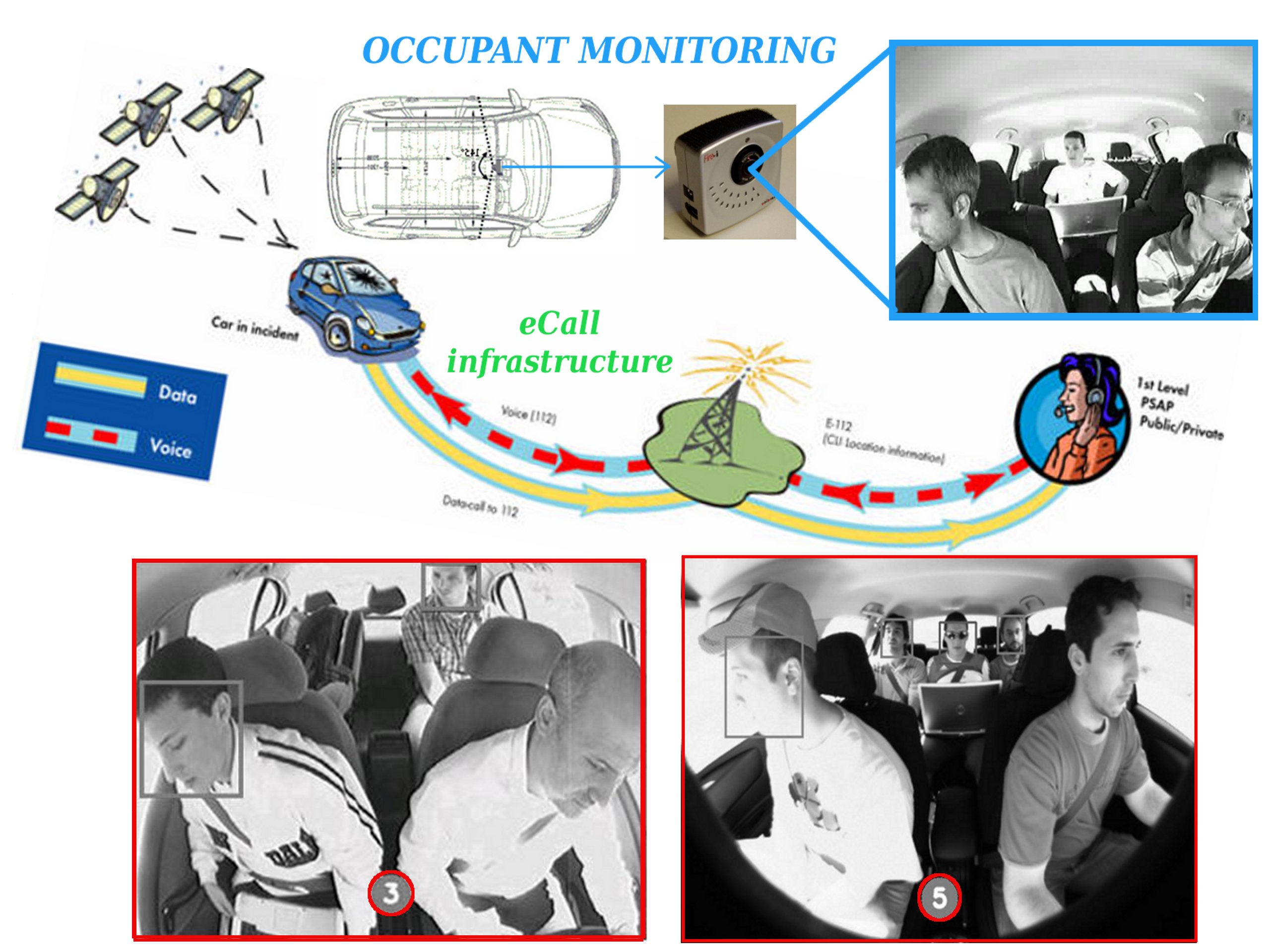
DRIVER-ALERT.
Funded by the Spanish Ministry of Competitiveness and Work for
the period 2009-2011.
Robocity2030-CM.
Funded by the Community of Madrid for the period 2006-2009 and
participating in conjunction with the remaining 5 public
Universities of Madrid.
SmartAparc. Funded by CI3-UAH and started in October
2014.
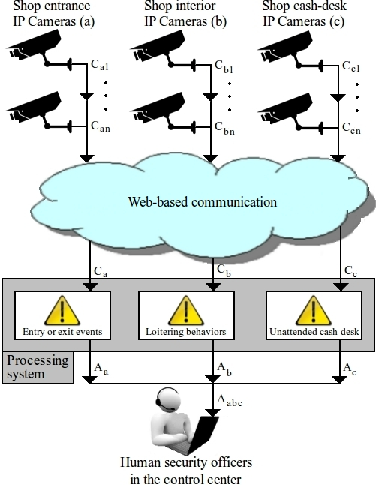
Expert Video
Surveillance System. Funded by ANOVA IT Consulting
for 5 months in 2012.
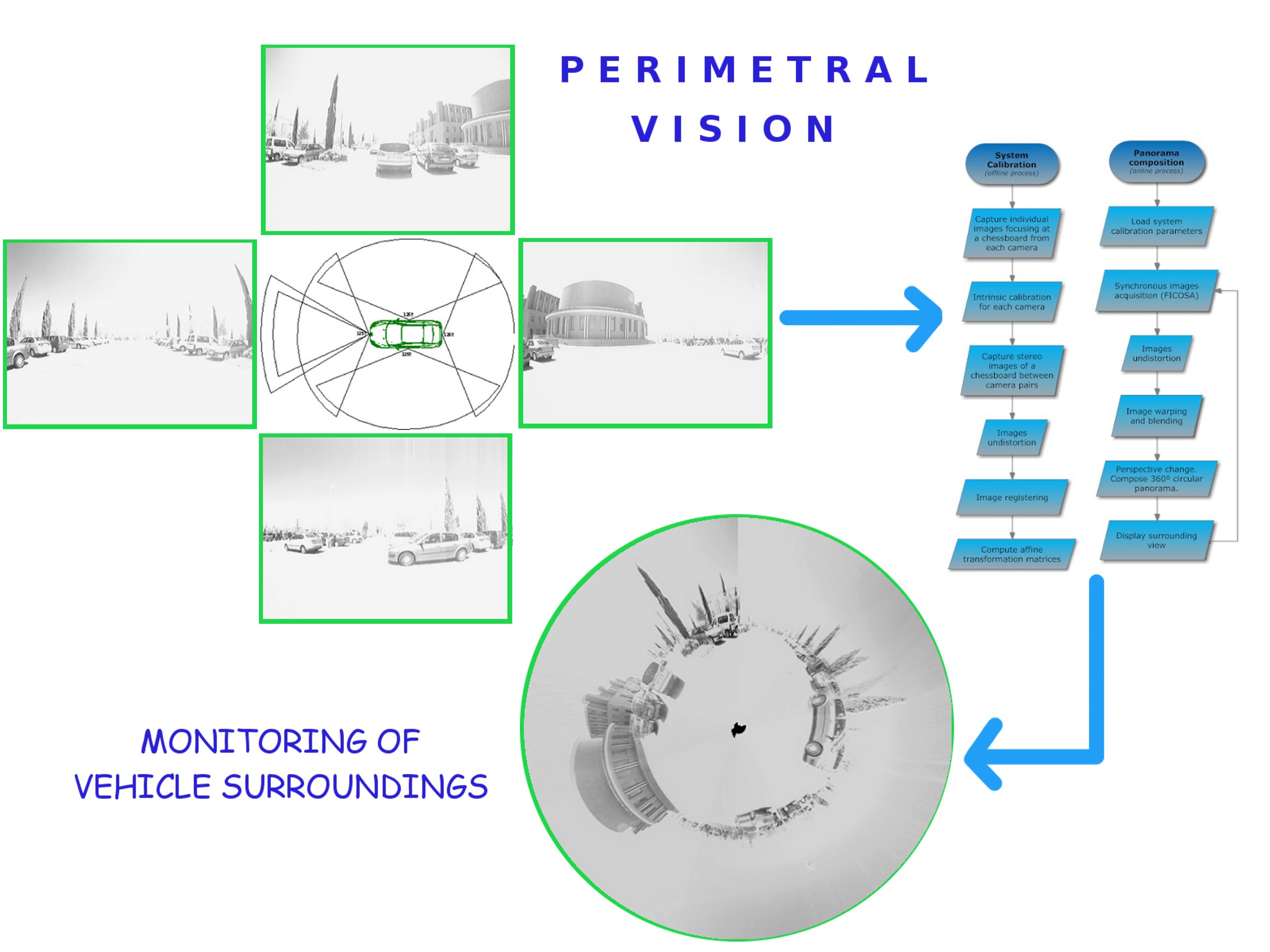
Advanced Driver
Assistance Systems. Funded by FICOMIRRORS S.A. for
two years (2009-2010).