The download of OpenABLE is available from Github: click here to access right now.
OpenABLE is an open toolbox that contributes different solutions and functionalities to the research community in the topic of life-long visual localization for autonomous vehicles.
The implemented code is in constant evolution, so improved versions will be uploaded when needed. The management of the implementation is operated by means of a repository created on GitHub, where the updates in the code are done. Please, in case you find any bug, contact the main author.
The code is opened to be used by the community attending to the copyright described in "License.txt". In addition, if you use our open toolbox in any publication or work, you must cite the corresponding papers where the theory and the description of the implementation of OpenABLE has been published:

OpenABLE is designed in C++ using a Linux OS. OpenCV libraries (3.0 or higher) are applied for computer vision functionalities and they must be installed to employ our toolbox. Compilation is easy, you can use "gcc" and "cmake" for it, a file called "CMakeLists.txt" is provided for this task.
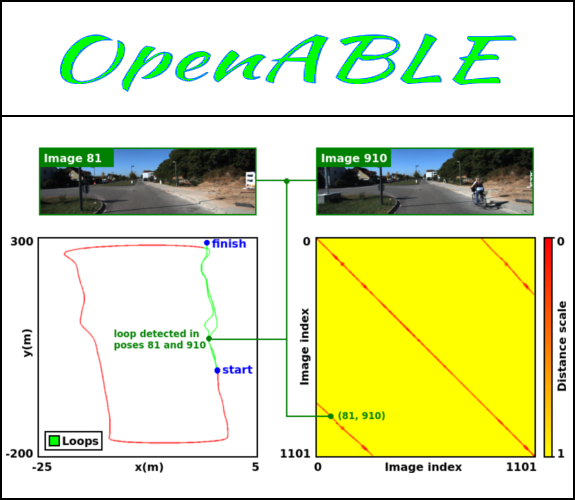
The code files included in the project are conveniently explained and commented. For a better comprehension, a test program is provided with the aim of evaluating it, where a distance matrix is returned with the results obtained in locations matching. A configuration file is also included for adjusting the main parameters that can be modified by the user. You can apply different configurations in your experiments. The execution of the test program can be done using the following command after compilation:
./Test_OpenABLE Config.txt
You can modify and use the toolbox in your own ways. Our code can be applied for different purposes related to localization, visual odometry or visual SLAM. Adapt the code to employ it in your own interests!
NOTE: Although the code is designed in a Linux OS, it is easily adaptable for application in Windows or MAC in a similar way.
OpenABLE is a project in constant evolution. Improved versions will be conveniently uploaded to GitHub.